← Back to projects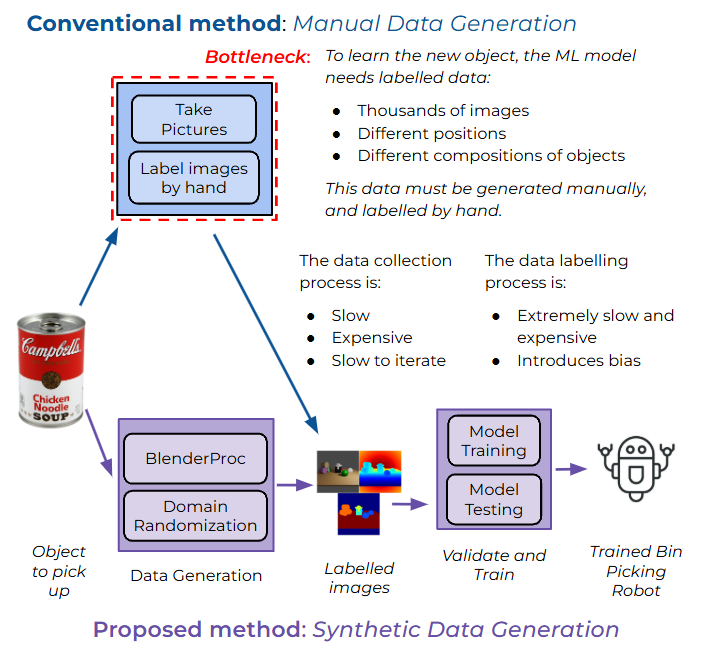
Synthetic Data Pipeline for Bin-Picking Robots
2022
BlenderProcMask-RCNNPythonDomain Randomization
Partnered with DaoAI Robotics to build a synthetic data generation pipeline that takes CAD models as input and outputs labeled RGB-D images for training computer vision models used in industrial bin-picking. The pipeline leveraged BlenderProc for photorealistic rendering with domain randomization (lighting, object placement, camera angles) and physics simulation for realistic object positioning. Trained Mask-RCNN models on purely synthetic data and validated against real-world images — achieving AP 100 on a calibration dataset and AP 73.9 on a complex package detection task. Built as a UBC Engineering Physics capstone project (ENPH 479).
See the full report below for more details.